PID实现流量控制
王硕
在实验使用空压机时,总是会出现上游压力不稳导致流量波动幅度大,压缩空气流量大,大量程的质量流量控制器价格过于昂贵,ALICAT-2000slm量程的需要将近五万元,于是考虑用流量计,PID控制器和电控开度阀自制一个控流装置,以实现稳定流量。
流量计可以输出4-20ma电流信号,将输出的电流信号接到PID控制器,pid设置上下限量程,由pid控制器输出控制信号,控制电控阀的开度。 管路连接顺序为,空压机气罐→流量计→电控球阀,流量计的电流信号作为pid的信号输入端,pid接收电流信号后表显流量数值,将控制指令以电流信号输出给电控阀,电控球阀根据指令实现调流稳压。
设备如图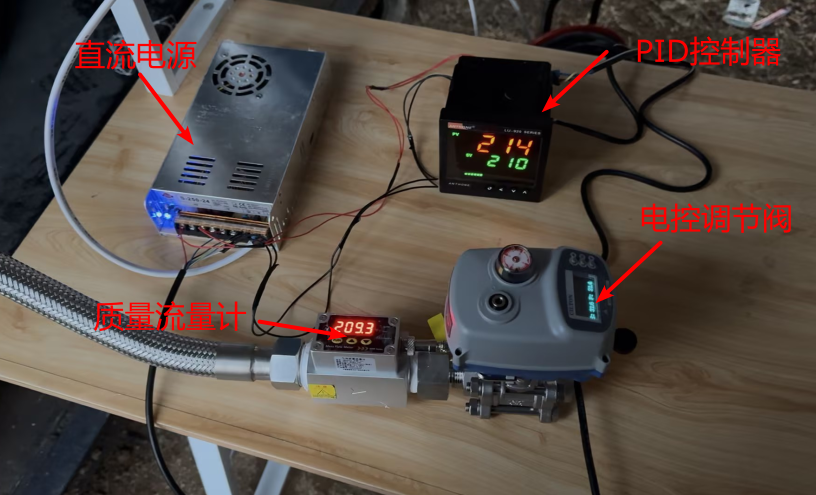
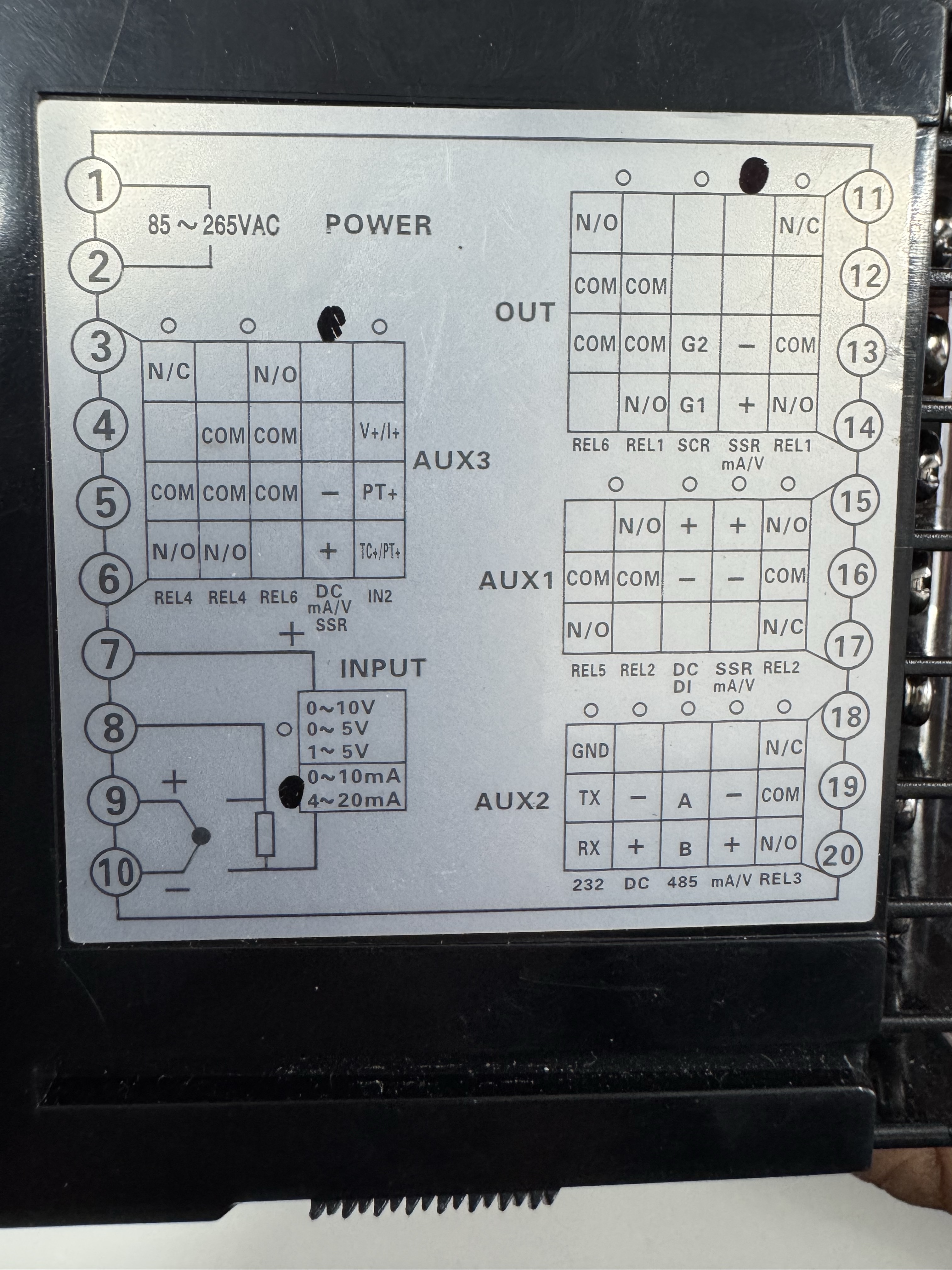
其中,流量计及电控阀需要接DC24V电源,pid控制器需要接85-265VAC,pid接线如图,
将pid控制器的上下限设置成与流量计量程一致,pid控制器的pv为实时信号换算值,sv为预设值,可根据需要设置成对应数值。 刚开始先使用25s电控阀进行实验。结果流量计数显正常,pid接收电流信号后表显数值与流量计相符,开度阀能正常工作,但开度阀会因流量超过预设流量而全部关闭然后打开,以此往复,未能达到预期结果。 猜测导致实验未达目的的原因是:电控开度阀的动作时间有滞后特性,pid的调节周期(采样频率)短,导致: 1.控制器频繁检测到流量波动,反复输出开度指令,阀门还没完成上一次动作,新的指令又到来,形成“指令打架”; 2.将控制器上下限设为0-1000(与流量计量程一致),阀门的开度指令范围应该是0-100%(对应4-20mA),控制器输出的“0”被阀门识别为“全关”,“1000”被识别为“全开”;当偏差出现时,PID输出容易直接触达0或1000的边界,导致阀门极限动作(全关/全开),而非平滑调节,加剧震荡。
在更换1s快调阀之后,再次进行第二次实验。与之前慢阀门的对比,阀门开关明显变快,开始工作后,上游流量充足,阀门部分开启,流量没有准确达到预设流量,会全部关闭后再重新增大或缩小阀门开度,以此往复,直至准确调整至预设流量,但这种全关的调节,需要消耗大量时间才能使流量达到预设流量,而且每次更改预设流量,都要重新调节,这显然是存在问题的。
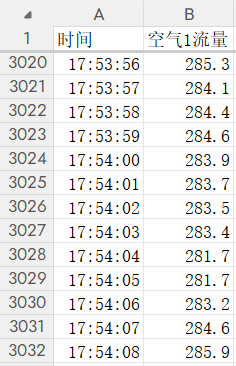
次日,进行了第三次实验。通过修改pid指令限幅,阀门全关问题解决,试了几个流量,流量基本能稳稳的控制在设定值,如图,
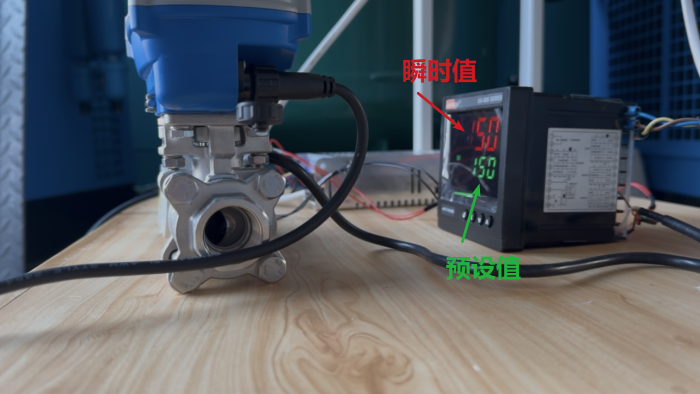 达到预期成果。有时流量会在区间内波动,可能与上游充气引起压力变化导致的。
达到预期成果。有时流量会在区间内波动,可能与上游充气引起压力变化导致的。
此后,进行多次实验总结了使用这套稳流装置的顺序:先开阀给充足的上游流量,然后调限幅,进行PID自整定(之前自整定之所以时间太长是因自整定时流量要超过几次预设值,流量未达到导致自整定失败,只有在实际使用环境才需要自整定。)可知道流量大概上下限,再微调限幅(OPI=FREE,OPL最小电流,OPH最大电流),然后就可以低幅度调流,实现稳流。在使用这个装置以后,上游的流量明显比之前稳定。